რობოტული გასაპრიალებელი მანქანა - მაღალი სიზუსტის ავტომატური ზედაპირის დამუშავება





დეტალური დიაგრამა
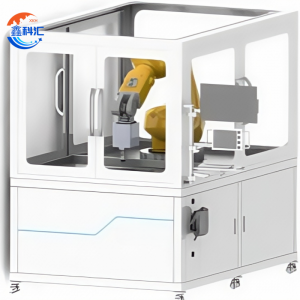

რობოტული გასაპრიალებელი მანქანის მიმოხილვა
რობოტული გასაპრიალებელი მანქანა არის მოწინავე, სრულად ავტომატიზირებული ზედაპირის დამუშავების სისტემა, რომელიც შექმნილია ზუსტი წარმოების უმაღლესი მოთხოვნების დასაკმაყოფილებლად. ის აერთიანებს ექვსღერძიან რობოტურ კონტროლს, ძალისმიერი უკუკავშირის გაპრიალების ტექნოლოგიას და ორმაგი თავის კონფიგურაციას, რათა განსაკუთრებული სიზუსტითა და თანმიმდევრულობით დაამუშაოს მასალების ფართო სპექტრი და რთული გეომეტრიული ფორმები.
იქნება ეს ოპტიკური ლინზები, აერონავტიკის ნაწილები, ზუსტი ინჟინერიის კომპონენტები თუ ნახევარგამტარული აპლიკაციები, ეს მანქანა უზრუნველყოფს სტაბილურ, განმეორებად და მაღალი ხარისხის ზედაპირის დამუშავებას - ნანომეტრის დონის ტოლერანტობის შემთხვევაშიც კი.


რობოტული გასაპრიალებელი მანქანის ყოვლისმომცველი სამუშაო ნაწილის თავსებადობა
სისტემა მხარს უჭერს შემდეგი პროცესების დამუშავებას:
-
ბრტყელი ზედაპირებიმინის, კერამიკის და ლითონის ფირფიტებისთვის
-
ცილინდრული და კონუსური ფორმებიროგორიცაა ლილვები, ლილვები და მილები
-
სფერული და ასფერული კომპონენტებიოპტიკური სისტემებისთვის
-
თავისუფალი ფორმის და ღერძის მიღმა ზედაპირებირთული მრუდებითა და გადასვლებით
მისი მრავალფეროვნება მას შესაფერისს ხდისროგორც მასობრივი წარმოება, ასევე მაღალი სიზუსტით შეკვეთით წარმოება.
რობოტული გასაპრიალებელი მანქანის ძირითადი მახასიათებლები და უპირატესობები
1. ორმაგი გასაპრიალებელი თავის ტექნოლოგია
-
აღჭურვილიაერთჯერადი ბრუნვადათვით-როტაციაგასაპრიალებელი თავები მოქნილობისთვის.
-
სწრაფი ხელსაწყოს შეცვლის შესაძლებლობა მხარს უჭერს დამუშავების მრავალ რეჟიმს ხანგრძლივი შეფერხების გარეშე.
-
იდეალურია უხეში და წვრილი გაპრიალების ეტაპებს შორის გადართვისთვის.
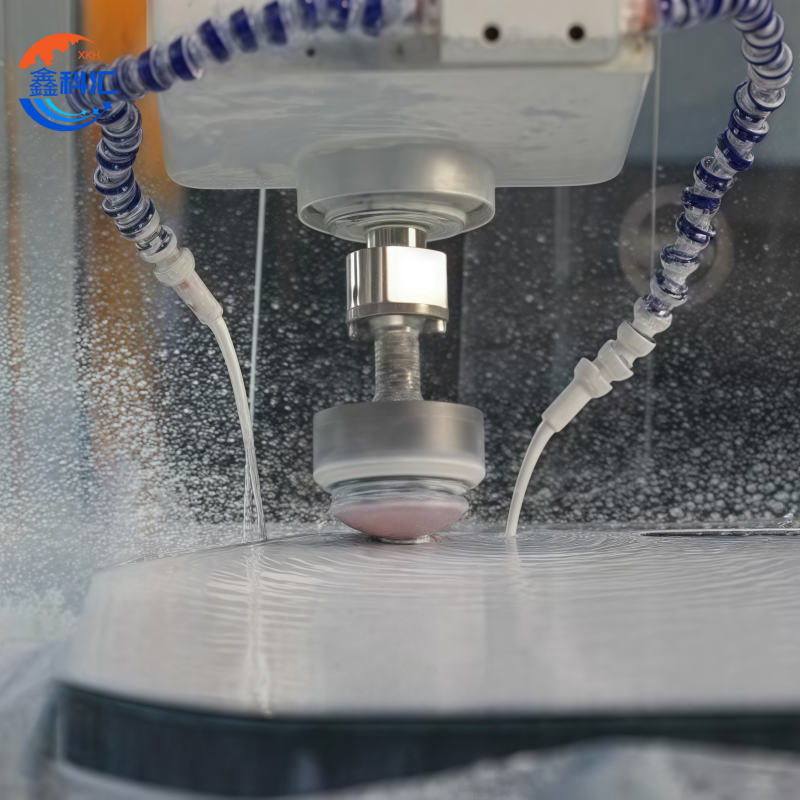
2. ზუსტი ძალის კონტროლის სისტემა
-
რეალურ დროში მონიტორინგიწნევა, ტემპერატურა და გასაპრიალებელი სითხის ნაკადი.
-
ძალის თანმიმდევრული გამოყენება უზრუნველყოფს სამუშაო ნაწილის ერთგვაროვან ზედაპირის დამუშავებას.
-
ზედაპირის დარღვევებთან ავტომატურად ადაპტირების უნარი.
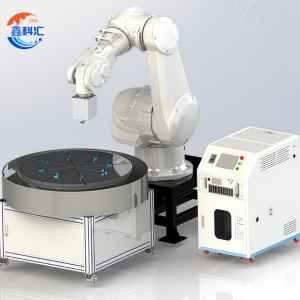
3. ექვსღერძიანი რობოტული კონტროლი
-
სრული გადაადგილების თავისუფლება რთული გეომეტრიული ფორმების დასამუშავებლად.
-
გლუვი, ზუსტი მოძრაობის ტრაექტორიები, გამოთვლილი მოწინავე ალგორითმების მეშვეობით.
-
მაღალი განმეორებითი პოზიციონირების სიზუსტე ±0.04 მმ-დან ±0.1 მმ-მდე, მოდელის მიხედვით.
4. ჭკვიანი ავტომატიზაცია და გაზომვა
-
ავტომატური კალიბრაციის ხელსაწყოები ზუსტი დაყენებისა და გასწორებისთვის.
-
ზუსტი პოზიციონირებისთვის კოორდინატების გაზომვის სისტემა.
-
არასავალდებულოონლაინ სისქის მონიტორინგირეალურ დროში ხარისხის კონტროლისთვის.
5. სამრეწველო დონის აწყობის ხარისხი
-
ორმაგი სერვოძრავის დიზაინი ზრდის გაპრიალების ეფექტურობას და სტაბილურობას.
-
ხისტი მექანიკური სტრუქტურა ამცირებს ვიბრაციას და უზრუნველყოფს ხანგრძლივ გამძლეობას.

რობოტული გასაპრიალებელი მანქანის ტექნიკური მახასიათებლები
| აღჭურვილობის მოდელი | რობოტის სხეული | განმეორებითი პოზიციონირების სიზუსტე | დამუშავების დიამეტრის დიაპაზონი | ერთჯერადი ბრუნვის გასაპრიალებელი თავი | მრავალბრუნიანი გასაპრიალებელი თავი | პატარა ხელსაწყო | მთავარი ბორბლის ტიპის გაპრიალება | სფერული თავის გაპრიალება | სწრაფი ცვლილების დასრულება | ავტომატური კალიბრაციის ინსტრუმენტი | კოორდინატის გაზომვის თავი | ონლაინ სისქის მონიტორინგი | რიცხვითი მართვის პლატფორმა |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | სტაუბლი TX2-90L | ±0.04 მმ / სრული დიაპაზონი | Φ50~Φ500 მმ | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | სტაუბლი TX2-140 | ±0.05 მმ / სრული დიაპაზონი | Φ50~Φ600 მმ | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | სტაუბლი TX2-160 | ±0.05 მმ / სრული დიაპაზონი | Φ80~Φ800 მმ | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | სტაუბლი TX200/L | ±0.06 მმ / სრული დიაპაზონი | Φ100~Φ1000 მმ | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1 მმ / სრული დიაპაზონი | Φ100~Φ1000 მმ | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1 მმ / სრული დიაპაზონი | Φ200~Φ2000 მმ | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1 მმ / სრული დიაპაზონი | Φ200~Φ2000 მმ | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
ხშირად დასმული კითხვები – რობოტის გასაპრიალებელი მანქანა
1. რა ტიპის სამუშაო ნაწილების დამუშავება შეუძლია რობოტ-საპრიალებელ მანქანას?
ჩვენი რობოტი-საპრიალებელი მანქანა სხვადასხვა ფორმისა და ზედაპირის, მათ შორის ბრტყელი, მოხრილი, სფერული, თავისუფალი ფორმისა და რთული კონტურების, მხარდაჭერის საშუალებას იძლევა. ის გამოდგება ოპტიკური კომპონენტებისთვის, ზუსტი ყალიბებისთვის, ლითონის ზედაპირებისთვის და სხვა მაღალი სიზუსტის გასაპრიალებელი აპლიკაციებისთვის.
2. რა განსხვავებაა ერთბრუნვა და მრავალბრუნვა საპრიალებელ თავებს შორის?
-
ერთჯერადი ბრუნვის გასაპრიალებელი თავიხელსაწყო ბრუნავს ერთი ღერძის გარშემო, იდეალურია სტანდარტული ზედაპირის დასამუშავებლად და მასალის მაღალსიჩქარიანი მოცილებისთვის.
-
მრავალბრუნიანი გასაპრიალებელი თავიინსტრუმენტი აერთიანებს ბრუნვას თვითბრუნვასთან (ორბიტაზე მოძრაობასთან), რაც საშუალებას იძლევა უფრო ერთგვაროვანი გაპრიალების მოხდეს მრუდ და არათანაბარ ზედაპირებზე.
3. რა არის დამუშავების მაქსიმალური დიამეტრი?
მოდელის მიხედვით:
-
კომპაქტური მოდელები (მაგ., IRP500S) სახელურებითΦ50–Φ500 მმ.
-
მასშტაბური მოდელები (მაგ., IRP2000AD) უმკლავდებიანΦ2000 მმ.
ჩვენს შესახებ
XKH სპეციალიზირებულია სპეციალური ოპტიკური მინის და ახალი კრისტალური მასალების მაღალტექნოლოგიურ შემუშავებაში, წარმოებასა და გაყიდვებში. ჩვენი პროდუქცია გამოიყენება ოპტიკურ ელექტრონიკაში, სამომხმარებლო ელექტრონიკასა და სამხედრო სფეროებში. ჩვენ გთავაზობთ საფირონის ოპტიკურ კომპონენტებს, მობილური ტელეფონის ლინზების გადასაფარებლებს, კერამიკას, LT-ს, სილიციუმის კარბიდის SIC-ს, კვარცს და ნახევარგამტარული ბროლის ვაფლებს. კვალიფიციური ექსპერტიზისა და უახლესი აღჭურვილობის წყალობით, ჩვენ წარმატებებს ვაღწევთ არასტანდარტული პროდუქციის დამუშავებაში და ვისწრაფვით ვიყოთ წამყვანი ოპტოელექტრონული მასალების მაღალტექნოლოგიური საწარმო.

მსგავსი პროდუქტები
-

4H-ნახევრად HPSI 2 დიუმიანი SiC სუბსტრატის ვაფლი პროდუქტი...
-
საბაჟო კვადრატული ყუთი სატრანსპორტო ყუთი კვადრატული ფანჯრის პ...
-

6 დიუმიანი HPSI SiC სუბსტრატის ვაფლი სილიკონის კარბიდი ...
-

საფირონის კორუნდი ძვირფასი ქვის Al2O3 ბროლისთვის...
-

ალუმინის მეტალის მონოკრისტალური სუბსტრატის გასაპრიალებელი...
-

Au დაფარული ვაფლი, საფირონის ვაფლი, სილიკონის ვაფლი...